

Por Luiz Padilha
![]()

Equipado com o que existe de mais moderno para desempenhar sua função, o Ulvön suspendeu no último dia 11 de outubro a partir da Base Naval de Karlskrona, levando o editor Luiz Padilha do DAN à bordo para acompanhar um dia de operações do navio no oceano Báltico.
Com o suspender marcado para 8:30 hs, acordei bem cedo para não me atrasar e após um rápido café da manhã, me encontrei com o oficial da Marinha da Suécia, Tenente Jimmi Adamson que iria me acompanhar no navio.


A entrada na Base foi rápida e logo estávamos no “portaló” do navio para o embarque. Fomos recebidos pelo comandante do Ulvön, o Capitão-de- Corveta Nills Forsberg que nos convidou para a simpática e funcional Praça d’Armas do navio, onde recebi o meu briefing sobre as atividades que o navio iria cumprir neste meu embarque.

Em seguida, me dirigi ao passadiço do navio para acompanhar a manobra de desatracação. A oficial na manobra do passadiço, passa suas ordens via rádio e acompanha a execução das mesmas indo à asa do passadiço para verificar. Após a passagem do último cabo, o navio utilizando seu sistema de propulsão Voith Schneider, sai primeiro com a popa em um movimento de 45°, deixando o cais rapidamente para logo em seguida guinar a boreste e livrar a área de manobra saindo na direção da rota programada, em uma manobra de desatracação muito rápida .


Enquanto o navio ruma para a área de exercícios, sou convidado a observar as operações no Centro de Informações de Combate (CIC), do navio e ter uma breve explicação do funcionamento de seus sensores, não sem antes observar durante nossa saída, um submarino da classe Gotland, atracado na base naval. Não tenho como saber o nome deste submarino, pois os submarinos suecos não possuem indicativo ou nome em sua vela ou casco. Logo após sairmos da área da base naval passando por construções centenárias que no passado protegiam a cidade, encontramos muita movimentação com meios da marinha sueca.



O navio de resgate submarino HMS Bellos (A 214) fundeado e um submarino da classe Södermanland que está chegando à base naval de Karlskrona. Durante nossa saída, a tripulação monta rapidamente as duas Metralhadoras FN MAG L7A2 7,62mm, uma em cada bordo, e vale ressaltar que o navio está com cargas de profundidade reais, ou seja, mesmo em treinamento os MCM (Caça Minas) estão prontos para qualquer eventualidade que venha a surgir.


O navio se aproxima da área onde executará a varredura sonar e, havendo um contato sonar, o navio enviará seu ROV (Remotely Operated Vehicle), para identificação. Dirijo-me então para a popa onde os ROVs estão sendo preparados para o exercício. O potente sonar do navio logo aponta para alguns possíveis contatos reais e um chama a atenção da operadora do sonar, que com sua experiência determina um deles para ser identificado.




Essa identificação será feita através do ROV Double Eagle MKII fabricado pela Saab Dynamics, que graças a sua incrível manobrabilidade e estabilidade, é o vetor utilizado pela marinha da Suécia para identificação e eliminação de minas. O binômio MCM classe Koster/Double Eagle MK II e III é considerado um sucesso, pois seus resultados são impressionantes. Em exercícios recentes, os MCM suecos obtiveram resultados expressivos ante outros navios da mesma categoria.

Um dos fatores que talvez explique a diferença nos resultados em exercícios, é o tempo que leva para colocar o ROV na água. A faina é muito rápida e em minutos o Double Eagle MKII é colocado no mar, se desconectando do guindaste e mergulhando rapidamente a caminho da área demarcada pelo operador do sonar.

Apesar de ser um treinamento, todo o CIC está focado e o oficial responsável pelo controle do ROV inicia sua navegação seguindo informações da operadora do sonar. Uma futura operadora observa tudo atentamente, se preparando para assumir a função após os treinamentos.


Os rumos vão sendo informados e, navegando a 1,6 metros do leito do mar, o ROV faz os mais de 400 metros de distância entre o navio e a mina passarem rapidamente. Agora o trabalho é identificar a mina, que neste caso, trata se de uma mina inerte de fabricação sueca.
Após a identificação e mais algumas manobras de ida e vinda até a mina (o leito do mar onde estávamos possuía muitos sedimentos, o que impedia por vezes a visão total da mina), é hora de trazer o ROV de volta ao navio.



O oficial operador após trazer o ROV para pouco mais de 50 metros do navio, passa o comando já no visual para um operador externo, que assume o controle com um console portátil, guiando o mesmo até a lateral do navio e rapidamente o guindaste arria o gancho que se conecta automaticamente ao ROV, trazendo-o a bordo em menos de 5 minutos.




Uma pausa para o almoço, e provo um cardápio diferente do nosso, porém, não menos saboroso feito pelo bem humorado cozinheiro do navio. Durante o almoço solicito ao comandante do navio, o embarque na lancha para realizar as fotos do HMS Ulvön navegando e se possível em alta velocidade, uma vez que a bordo essa tarefa é impossível. Inicialmente a proposta é bem aceita, mas o tempo na parte da tarde se torna desafiador até mesmo para os acostumados marinheiros suecos. A temperatura cai vertiginosamente e o comandante busca outra solução. Como todo navio de guerra, o Ulvön também tem seu mascote (O Lobo caçador de minas), e este mostra muito bem a alma do navio, com o lema “Aquele que procura acha. Aquele que arrisca vence”.

Agora é a vez do sensível ROV Sea Fox da Atlas. Este ROV tem uma função suicida, pois sua função é ir até a mina, e se chocar contra ela provocando sua destruição. Ao descer para acompanhar os preparativos do lançamento, vejo a câmara hiperbárica com capacidade para receber até 2 mergulhadores e um médico, o que demonstra a capacidade que este tipo de navio possui para realizar sua missão fim.


Seu lançamento é um pouco diferente, com o guindaste levando-o a poucos metros da água quando o mesmo é solto. Como no exercício anterior, um oficial e uma operadora do sonar estão na coordenação só que agora com um pouco mais de dificuldade, pois o Sea Fox é bem menor que o Double Eagle MKII.


A experiência de anos operando os sistemas fazem a diferença. Concluído o treinamento, é hora de trazer o Sea Fox de volta ao navio e para seu recolhimento, uma espécie de cesta é colocada do lado do navio, com o operador externo (mesmo procedimento anterior), manobrando para passar com o ROV próximo ao costado do navio e ser capturado pela cesta.


O tempo parece não querer ajudar muito, com vento e frio constantes, mas é hora de colocar o Double Eagle MKII no mar outra vez. Desta vez para colocar uma carga explosiva junto à mina para sua detonação. O procedimento é o mesmo da vez anterior e com o caminho já conhecido, a chegada do ROV junto a mina é bem rápido e com muita perícia. O oficial se aproxima sem levantar muito os sedimentos do leito do mar, deixando a carga através de uma pinça hidráulica que se estende até a mina. Por se tratar de uma carga inerte, após ser solta ela flutua até a superfície sendo recolhida pela tripulação do navio.
Eu estava acompanhando esse treinamento no CIC (Centro de Informações de Combate), quando sou convidado a pilotar o Double Eagle MKII. Apesar de extremante surpreso, aceitei o desafio, pois um ano antes pilotei o mesmo modelo no tanque de testes da empresa na cidade de Motala. Mas um tanque é sempre um tanque, onde não existem correntes marinhas.

Como os controles do ROV em uso eram diferentes dos que eu tinha tido contato anteriormente (Veja aqui o artigo “Saab Dynamics Underwayer Systems), o oficial me passou as instruções de controle, e assim fui mergulhando o mesmo, acompanhando pela tela até chegar a 1,6 metros do leito do mar, tentando manter a velocidade estipulada, o que não é fácil com a corrente te empurrando para trás o tempo todo.
Com a operadora do sonar me ‘cantando’ as proas, fui guiando lentamente o ROV, que encontrava a uma distância de 400 metros da mina. Hora de acelerar o ROV, acabei passando um pouco do limite que tinham me passado, mas rapidamente eu já estava a menos de 200 metros e chegando. A aparição na tela da mina me pegou de surpresa pois é tanta coisa para controlar que quando vi, já estava em cima dela.
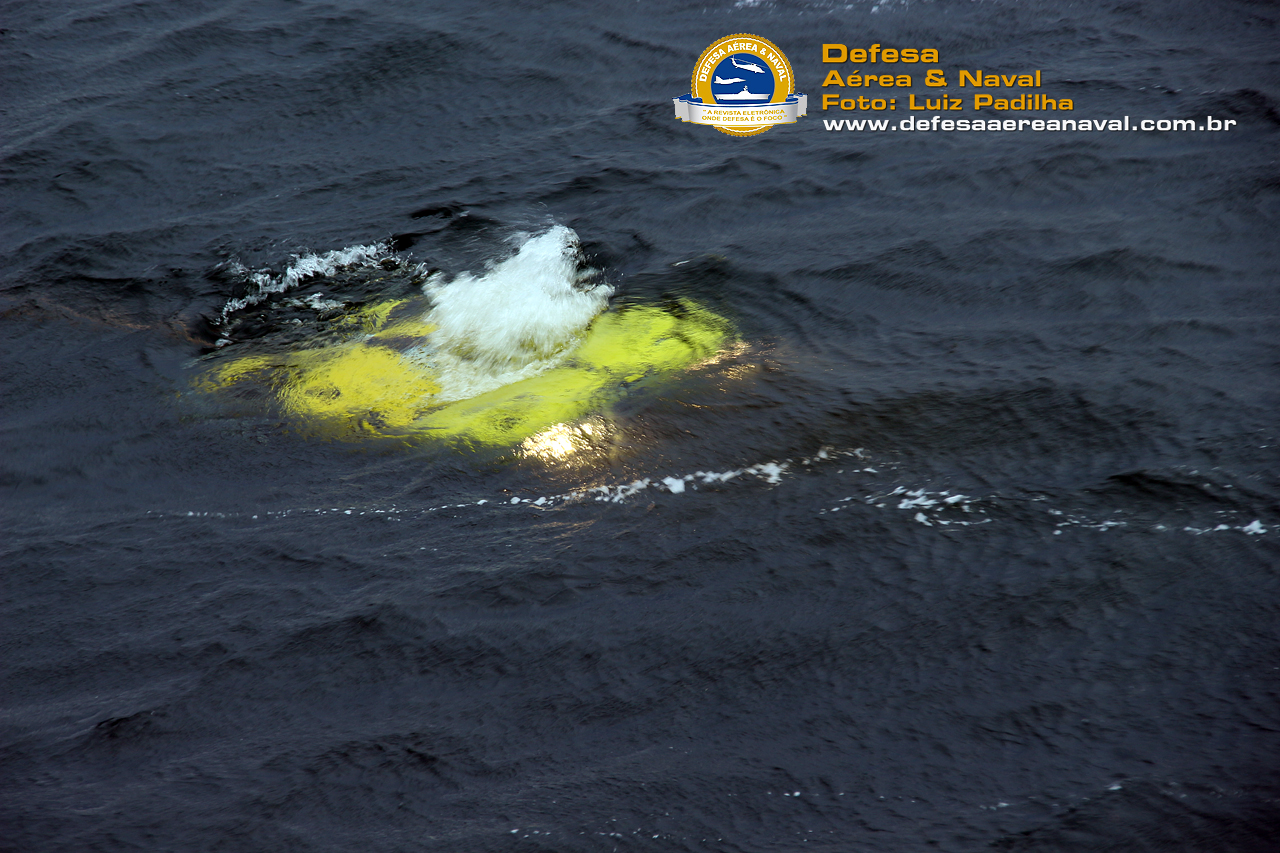
Novato é assim mesmo. Consegui me manter em cima da mina girando levemente, mas a corrente não me dava trégua. Como o objetivo era chegar na mina, passei o controle para o “dono” do ROV e me dirigi para para a popa afim de acompanhar seu retorno ao navio, o que é fácil de se ver devido a potencia dos faróis que mesmo antes dele chegar a superfície já mostram sua localização.
Com o ROV a bordo, o comandante pede para me informar que devido as condições do tempo, minha ida com a lancha do navio para a seção de fotos foi substituída por passagens em alta velocidade do MCM da mesma classe do Ulvön. O HMS Vinga (M 75), que eu visitei e foi parte do artigo que fiz durante minha visita a Karlskrona em 2015, realizou as passagens para as fotos.

Com duas passagens em sua velocidade máxima (15 nós), consegui fotografar e filmar como o navio se comporta utilizando a propulsão Voith Schneider, desconhecida por muitos e que para o que se destina, é extremamente eficiente. Assista ao vídeo aqui!



Após as passagens, o HMS Vinga retornou o seu exercício enquanto nós, nos dirigimos à base naval de Karlskrona. O comandante nos convidou para o jantar a bordo e o cozinheiro do navio mais uma vez surpreendeu com um menu delicioso.


Logo após o jantar a tripulação já se engajava na manobra para a entrada no canal da base e mais uma vez, a oficial (uma tenente), levou o navio até a atracação em uma perfeita coordenação entre a tripulação. Ao fim, nos despedimos do comandante Nills agradecendo pelo dia perfeito onde foi possível verificar e comprovar a qualidade dos Caça Minas suecos construídos no estaleiro Saab-Kockums.

Na chegada ao cais foi possível observar os dois MCMs classe Landsort que foram oferecidos para a Marinha do Brasil. Na oferta, eles seriam modernizados para o padrão da classe Koster, ou seja, receberiam o mesmo up-grade, ficando iguais ao que eu tinha acabado de desembarcar. (Veja o artigo “Saab Kockums – Os novos caça minas para a Marinha do Brasil”)![]()
NOTA DO EDITOR: Nossos agradecimentos à Marinha da Suécia e ao Sr. Robert Petersson do estaleiro Saab Kockums, por possibilitarem a realização deste artigo.